
Model míčku na nakloněné rovině reprezentuje pochody objevující se při řízení nestabilních systémů, které se typicky vyskytují v letectví a kosmonautice. Systém modeluje problémy, s jakými se musejí potýkat například designéři letadel, aby stabilizovali a optimalizovali chování letadel při startu, letu a přistání. Model je připojen k počítači pomocí multifunkční vstupně-výstupní karty umožňující čtení výstupů a nastavování vstupů. Tato učební pomůcka byla zakoupena v roce 2011 ze zdrojů Grantového programu Jihočeského kraje „Zavádění nových technologií do středních a vyšších odborných škol“. Cena činila 164 816 Kč.

Vstupy a výstupy rozhraní
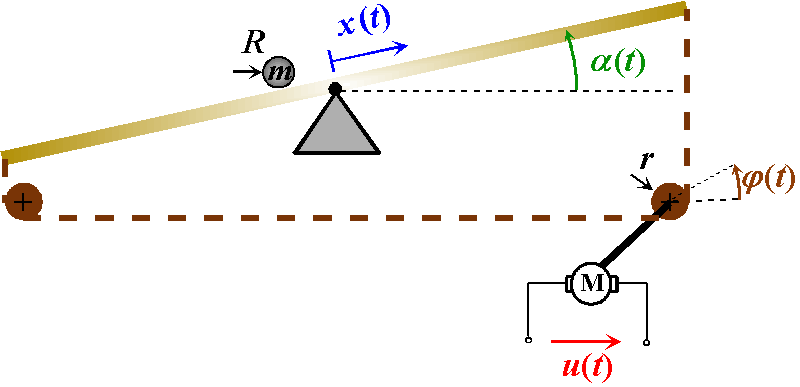
- Vstupy: napětí motoru u [V]
- Výstupy: úhel roviny α [°], poloha míčku x [m]
Využití pro výuku
- SŠ: ověření fyzikálních zákonů v mechanice (Newton, tření)
- SŠ: měření statické převodní charakteristiky snímače
- VOŠ: modelování a identifikace dynamických systémů
- VOŠ: návrh řízení náklonu roviny PID regulátorem
- VOŠ: stabilizace míčku PID regulátorem (více smyčková regulace)
Odkazy
[1] Roubal, J. Výukové materiály pro Laboratoř aplikované informatiky na VOŠ, (Bakalářská práce), ČVUT v Praze, MUVS, Praha, 2012.
[2] MOODLE VOŠ [online], ⟨https://moodleVOS.copsu.cz/⟩.
